概要
Raspberry Pi Picoを導入した記録。導入済みのRaspberry Pi 4Bに接続して、RaspbianのThonnyで動作確認。
購入したもの
Rasberry Pi Pico本体と接続用のUSBケーブル。
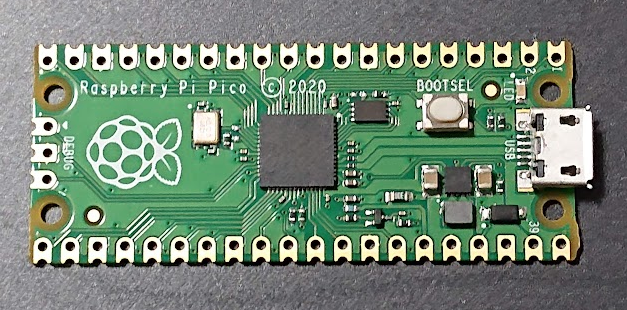
本体はプラスチック製のパッケージに入っていて、この上から透明フィルムでカバーされていた。フィルムがケースに貼り付けられているのが両側の耳の部分だけで間はペラペラと隙間が空いていたが、これくらいでも大丈夫なくらい頑丈ということか。

Picoの本体。右側がMicoroBのUSBソケットで、その左側に白いBOOTSELスイッチとLEDがある。
Thonnyの接続テスト
ファームウェアの準備
以下の手順でThonnyの接続環境を整えた。
- Raspberry Pi親機を起動しておく
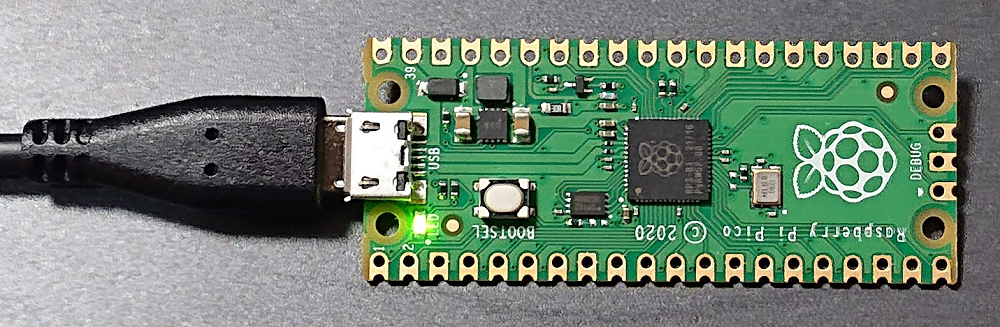
- PicoのBOOTSELスイッチを押しながら、PicoとPi親機をUSBで接続
- Picoがリムーバブルディスクとして認識されるのでファイルマネージャーで開く
- /media/pi/RPI-RP2ディレクトリーが開き、INDEX.HTMとINDO_UF2.TXTの2つのファイルが入っている
- INDEX.HTMをダブルクリックしてRaspberry Pi Documentationのページを表示し、MicroPythonのファームウェアをダウンロード
- ダウンロードされた拡張子uf2のファイルをINDEX.HTMLと同じディレクトリーにコピー
Thonny接続テスト
- Thonny右下のPython表示をクリックしてMycroPython (Raspberry Pi Pico)に変更
- 以下のコードを書いてローカルに保存、実行
1234import machineled = machien.Pin(25, machine.Pin.OUT)led.value(1) - 点灯を確認(左下の緑色LEDが点灯している)
led.value(0)に変更して実行してLEDを消灯- 以下のコードでLEDのON/OFF点滅を確認
12345678import machine, utimeled = machine.Pin(25, machine.Pin.OUT)while True:led.value(1)utime.sleep(0.5)led.value(0)utime.sleep(0.5)
Picoの自動実行
自動実行方法
Picoにmain.pyファイルが保存されていると、電源接続後にその内容を実行する。
Thonnyを使っている場合、親機で実行確認後に同じ内容のファイルをmain.pyとしてPicoに保存する。
自動実行内容の編集・削除
main.pyを持つPicoからこのファイルを削除したり、別の内容に書き換えたい場合には、ThonnyのメニューからRun→Stop/Restart backendを指定。
停止後にmain.pyを削除したり書き換えた後、再度Stop/Restart backendで動作を開始させる。
注意点
BOOTSELは初期化
- BOOTSELを押しながらPicoを接続するとPicoの内容が初期化される
- 初期化後に環境を構築すると、以後はBOOTSELを押さずに接続してその環境で実行できる
- 逆に言えば、BOOTSELで接続すると前の環境は消えてしまう
ファームウェアを入れるとRPI-RP2は見えなくなる
- BOOTSEL直後はPicoがリムーバブルディスクとして/media/pi/RPI-RP2で確認できる
- ここでたとえばMicroPythonのファームウェアを入れると/media/piの中が空になり、RPI-RP2は見えなくなる
ThonnyでPico側のファイルを確認できる
- ただしローカルで作成したPythonコードはPicoと接続しているThonnyによってPicoに転送されている
- これを確認するには、ThonnyをReguler modeで起動し、表示(View)でファイル(Files)をチェックする