動物の群の行動をシミュレートする”Boids”という考え方をCoffeeScriptで組んでみたもの。個体がそれぞれ独立して一定のルールに従って行動する結果、群としての整然とした行動をとるようになる。
Boids 2.3では、分離(Separation)、結合(Cohesion)に加えて「整列(Alignment)」のルールを導入する。整列行動の考え方は、ここでは以下の通りとした。
なおこのバージョンで、個体生成時にランダムに与える速度の計算方法を変更した。
これまで、個体を生成したときに与える速さは、上限値V_MAXを定数としておいて、V_MAX~VMAX/2の範囲で一様乱数を発生させていた。
|
1 2 3 4 5 6 |
class Controler ..... createCreature: -> ..... v = (Math.random() + 1) * Creature._vMax / 2 ..... |
Boids 2.3では、速さの上限値vMAXに加えて下限値vMINをCreatureクラスのクラス変数に持たせて、この間の一様乱数で速さを設定する。
|
1 2 3 4 5 6 |
class Controler ..... createCreature: -> ..... v = Math.random() * (Creature._vMax - Creature._vMin) + Creature._vMin ..... |
これに伴って、以下を追加
<script>要素に定数V_MINを追加ControlerクラスにvMinのセッターを追加V_MINの値をCreature._vMinにセット|
1 2 3 4 5 6 7 |
<script> //<![CDATA[ BD23_V_MAX = 100; BD23_V_MIN = 0; ..... //]]> </script> |
|
1 2 3 4 5 6 |
class Controler ..... # 定数として扱うクラス変数を設定するメソッド群 setVMax: (vMax) -> Creature._vMax = vMax setVMin: (vMin) -> Creature._vMin = vMin ..... |
|
1 2 3 4 5 6 7 |
jQuery ($) -> ..... # 固定パラメータのセット # パラメータの値は、Javascript形式でHTMLに埋め込まれている想定 controler.setVMax(BD23_V_MAX) controler.setVMin(BD23_V_MIN) ..... |
次図において、先方視野内に個体が存在する場合、それらの平均速度vmeanを計算する。

なお視野内の判定は、ベクトルの前後判定と個体との距離計算によっている。
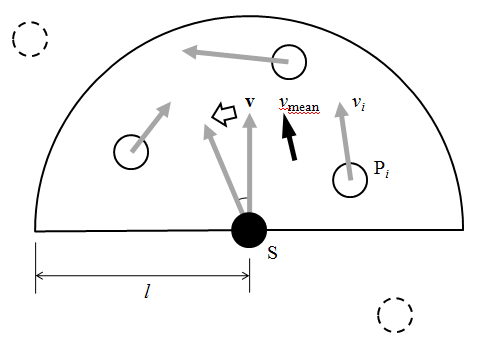
先の図のように、自身の進行方向に対する平均速度の方向によって、以下の手順で進路を変更する。
これらの考え方はBoids 2.1の分離行動における回避動作と同じ。
HTMLで定義する初期パラメータに、整列に関する以下の変数を追加する。
BD23_ALIGNMENT_FIELD_DEPTH)BD23_ALIGNMENT_ANGLE)なお、このバージョンで分離行動の視野の深さの変数名を変更している。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
<script> //<![CDATA[ BD23_V_MAX = 100; BD23_V_MIN = 0; BD23_CREATURE_SIZE = 10; BD23_WALL_DETECTION_LENGTH = 100; BD23_WALL_REPULSION_PARAM = 16; // boIDS2.3で名前変更:分離行動の視野の深さ BD23_SEPARATION_FIELD_DEPTH = 50; BD23_SEPARATION_ANGLE = 10 * Math.PI / 180; BD23_COHESION_ANGLE = 5 * Math.PI / 180; // Boids 2.3で追加:整列行動の視野の深さと速度変更角 BD23_ALIGNMENT_FIELD_DEPTH = 250; BD23_ALIGNMENT_ANGLE = 5 * Math.PI / 180; BD23_INTERVAL_SEC = 0.05; //]]> </script> |
初期パラメータの保存のため、Creatureクラスのクラス変数を追加する。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
class Creature extends MovingAgent # private staticなクラス・プロパティ # ランダムに速度を発生させるときの最大速度と最小速度 @_vMax: 100 @_vMin: 50 # 描画の基本となるサイズ @_drawSize: 8 # 壁の衝突回避を認識する距離 @_wallDetectionLength: 100 # 反発力パラメータ @_wallRepulsionParam: 4 # 視野の長さ(奥行) @_separationFieldDepth: 100 # 分離行動の回避角 @_separationAngle: 0 # 結合行動の回避角 @_cohesionAngle: 0 # 整列高度の視野の長さ(奥行) @_alignmentFieldDepth: 100 # 整列行動の変化角 @_alignmentAngle: 0 ..... |
Controlerクラスに、Creatureクラス変数へのセッターを定義する。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
class Controler ..... # 定数として扱うクラス変数を設定するメソッド群 setVMax: (vMax) -> Creature._vMax = vMax setVMin: (vMin) -> Creature._vMin = vMin setCreatureSize: (size) -> Creature._drawSize = size setWallDetectionLength: (pix) -> Creature._wallDetectionLength = pix setWallRepulsionParam: (param) -> Creature._wallRepulsionParam = param setSeparationFieldDepth: (length) -> Creature._separationFieldDepth = length setSeparationAngle: (angle) -> Creature._separationAngle = angle setCohesionAngle: (angle) -> Creature._cohesionAngle = angle setAlignmentFieldDepth: (length) -> Creature._alignmentFieldDepth = length setAlignmentAngle: (angle) -> Creature._alignmentAngle = angle setIntervalSec: (@interval_sec) -> ..... |
HTMLで定義されたパラメータをControlerオブジェクトのセッターによってセットする。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
# スクリプトが読み込まれた時の実行部分 jQuery ($) -> # Controlerを作成し、canvasオブジェクトを渡す canvas = $("#Boids23_canvas")[0] controler = new Boids23.Controler(canvas) # 固定パラメータのセット # パラメータの値は、Javascript形式でHTMLに埋め込まれている想定 controler.setVMax(BD23_V_MAX) controler.setVMin(BD23_V_MIN) controler.setCreatureSize(BD23_CREATURE_SIZE) controler.setWallDetectionLength(BD23_WALL_DETECTION_LENGTH) controler.setWallRepulsionParam(BD23_WALL_REPULSION_PARAM) controler.setSeparationFieldDepth(BD23_SEPARATION_FIELD_DEPTH) controler.setSeparationAngle(BD23_SEPARATION_ANGLE) controler.setCohesionAngle(BD23_COHESION_ANGLE) controler.setAlignmentFieldDepth(BD23_ALIGNMENT_FIELD_DEPTH) controler.setAlignmentAngle(BD23_ALIGNMENT_ANGLE) controler.setIntervalSec(BD23_INTERVAL_SEC) ..... |
Creatureクラスのmove()メソッドがalignment()メソッドを呼び出すようにする。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
class Creature extends MovingAgent ..... move: (interval_sec) -> # 壁を避ける @wallAvoidance() # 分離行動(separation) @separation() # 結合行動(cohesion) @cohesion() # 整列行動(alignment) @alignment() ..... |
alignment()メソッドを新たに定義する。
cs、snを定義しているvMeanプロパティに保存されるが、視野内に個体が存在しないときはnullとなる|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 |
# Boids2.3 # 整列行動(alignment) # 分離行動と同じ視野内の個体群の平均速度に合わせるよう速度の方向を変更 alignment: -> # 平均速度計算用 vMean = null n = 0 # 整列行動の方向転換計算用cos/sin cs = Math.cos(Creature._alignmentAngle) sn = Math.sin(Creature._alignmentAngle) # 自分以外の群のすべての個体についてサーチ for other in @cluster.creatures if other != this # その個体が自分の前方にいるなら if other.isInFrontOf(this) d = Vector.distance(this.pos, other.pos) # その個体が視野の中にいるなら if d <= Creature._alignmentFieldDepth # 既に個体が視野内にあれば平均速度の計算を続行 n++ if vMean? vMean.plusEq(other.v) else vMean = new Vector(0, 0) # 視野内に個体がいたなら速度変更の計算へ if vMean? vMean.divEq(n) ### @v.plusEq(vMean) newV = @v.abs() if newV >= Creature._vMax @v.timesEq(vMean.abs() / newV) ### if vMean.isHeadingToRightOf(@v) vx = @v.x * cs + @v.y * sn vy = -@v.x * sn + @v.y * cs else vx = @v.x * cs - @v.y * sn vy = @v.x * sn + @v.y * cs @v.x = vx @v.y = vy |
以下に、分離、結合、整列の3ルールすべてを適用したBoids 2.3の全コードを示す。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 |
# Boids 2.3 # Boids 2.2に整列行動(alignment)を加える Boids23 = {} # パッケージBoids23の本体 do -> # 独自クラスのエイリアス # パッケージtaustation_geom2d.jsが必要。 Vector = taustation_geom2d.Vector MovingAgent = taustation_geom2d.MovingAgent # Boidsが活動する空間のクラス # このバージョンでは、canvasオブジェクトの上下左右の座標を持つ長方形 class Field constructor: (canvas) -> @xMin = 0 @yMin = 0 @xMax = canvas.width @yMax = canvas.height # Boidsの個体を実現するクラス # 位置座標と速度ベクトルの成分を保持する # 自らが活動するFieldクラスのオブジェクトへの参照も保持する class Creature extends MovingAgent # private staticなクラス・プロパティ # ランダムに速度を発生させるときの最大速度と最小速度 @_vMax: 100 @_vMin: 50 # 描画の基本となるサイズ @_drawSize: 8 # 壁の衝突回避を認識する距離 @_wallDetectionLength: 100 # 反発力パラメータ @_wallRepulsionParam: 4 # 視野の長さ(奥行) @_separationFieldDepth: 100 # 分離行動の回避角 @_separationAngle: 0 # 結合行動の回避角 @_cohesionAngle: 0 # 整列高度の視野の長さ(奥行) @_alignmentFieldDepth: 100 # 整列行動の変化角 @_alignmentAngle: 0 # コンストラクタの引数にはFieldオブジェクトを渡す # 位置、速度、加速度、自分が属する群、Fieldをプロパティとして持つ constructor: (cluster, field) -> super() @a = new Vector(0, 0) @cluster = cluster @field = field @nearestCreature = null # 個体を描画するメソッド # canvasのコンテキストを引数で受け取る draw: (ctx) -> v = @v.abs() sx = Creature._drawSize * @v.x / v sy = Creature._drawSize * @v.y / v p = 0.25 ctx.fillStyle = "black" ctx.beginPath() ctx.moveTo(@pos.x + (1 - p) * sx, @pos.y + (1 - p) * sy) ctx.lineTo(@pos.x + (-sx - sy) * p, @pos.y + (sx - sy) * p) ctx.lineTo(@pos.x + (-sx + sy) * p, @pos.y + (-sx - sy) * p) ctx.closePath() ctx.fill() return # 個体を動かすメソッド # 「群れ」を表すClusterクラスのmove()メソッドから呼ばれる # interval_secは秒単位のアニメーション・フレームのインターバル move: (interval_sec) -> # 壁を避ける @wallAvoidance() # 分離行動(separation) @separation() # 結合行動(cohesion) @cohesion() # 整列行動(alignment) @alignment() # 加速度を考慮した速度の変化を計算 # 速度の絶対値が増え続けないようにキャップで抑える # 速度成分の符号を得るのに、Math.signがサポートされていないブラウザが多いため、 # 値/絶対値で符号を得ている @v.plusEq(@a.times interval_sec) @v.x = @v.x / Math.abs(@v.x) * Math.min(Math.abs(@v.x), Creature._vMax) @v.y = @v.y / Math.abs(@v.y) * Math.min(Math.abs(@v.y), Creature._vMax) # インターバルの間の移動量を計算 @pos.plusEq(@v.times interval_sec) # 壁にぶつかった場合は全反射 if @pos.x <= @field.xMin @pos.x = @field.xMin * 2 - @pos.x @v.x = -@v.x else if @pos.x >= @field.xMax @pos.x = @field.xMax * 2 - @pos.x @v.x = -@v.x if @pos.y <= @field.yMin @pos.y = @field.yMin * 2 - @pos.y @v.y = -@v.y else if @pos.y >= @field.yMax @pos.y = @field.yMax * 2 - @pos.y @v.y = -@v.y return # 壁を避ける行動 # 壁からの距離に応じた斥力を(repulsion)想定し、x/y方向の加速度を計算 wallAvoidance: -> if @pos.x <= Creature._wallDetectionLength @a.x = Creature._wallRepulsionParam * (Creature._wallDetectionLength / @pos.x) ** 2 else if @pos.x >= @field.xMax - Creature._wallDetectionLength @a.x = -Creature._wallRepulsionParam * (Creature._wallDetectionLength / (@field.xMax - @pos.x)) ** 2 else @a.x = 0 if @pos.y <= Creature._wallDetectionLength @a.y = Creature._wallRepulsionParam * (Creature._wallDetectionLength / @pos.y) ** 2 else if @pos.y >= @field.yMax - Creature._wallDetectionLength @a.y = -Creature._wallRepulsionParam * (Creature._wallDetectionLength / (@field.yMax - @pos.y)) ** 2 else @a.y = 0 # Boids2.1 # 分離行動(separation) # 前方視角180度内で一定距離内の視野の中で、最も近い個体を避ける # 相手方の速度の向きには関係なく、相手側と反対方向に速度の向きをを少し変更する。 separation: -> # 回避行動の方向転換計算用cos/sin cs = Math.cos(Creature._separationAngle) sn = Math.sin(Creature._separationAngle) # 自身に最も近い個体 @nearestCreature = null # 自分以外の群のすべての個体についてサーチ for other in @cluster.creatures if other != this # その個体が自分の前方にいるなら if other.isInFrontOf(this) d = Vector.distance(this.pos, other.pos) # その個体が視野の中にいるなら if d <= Creature._separationFieldDepth # 周世に個体がセットされていて、今回の個体の方が近ければ入れ替え # 最初に認識した個体ならそのままセット if @nearestCreature? if d <= Vector.distance(@nearestCreature.pos, this.pos) @nearestCreature = other else @nearestCreature = other # 近くの個体が視野内に存在するなら回避計算 if @nearestCreature? # 相手が自分の右にいるなら左へ、自分の左にいるなら右へ向きを変更 if @nearestCreature.isOnTheRightOf(this) vx = @v.x * cs - @v.y * sn vy = @v.x * sn + @v.y * cs else vx = @v.x * cs + @v.y * sn vy = -@v.x * sn + @v.y * cs @v.x = vx @v.y = vy # Boids2.2 # 結合行動(cohesion) # 前方視角180度以内の全個体の重心に向かって速度を少し変更する cohesion: -> # 群のうち認識した個体の数とそのグループの重心 n = 0 clusterCenter = null # 結合行動の方向転換計算用cos/sin cs = Math.cos(Creature._cohesionAngle) sn = Math.sin(Creature._cohesionAngle) # 自分以外の群のすべての個体についてサーチ for other in @cluster.creatures if other != this # 相手が自身の前方にいるなら、その位置を考慮 if other.isInFrontOf(this) n++ if clusterCenter? clusterCenter.plusEq(other.pos) else clusterCenter = new Vector(other.pos.x, other.pos.y) # 前方の相手が1つでも存在すれば、結合行動をとる if clusterCenter? clusterCenter.divEq(n) # 重心が自分の右にあれば左に、自分の左にあれば右に進路を変更 if clusterCenter.isOnTheRightOf(this) vx = @v.x * cs + @v.y * sn vy = -@v.x * sn + @v.y * cs else vx = @v.x * cs - @v.y * sn vy = @v.x * sn + @v.y * cs @v.x = vx @v.y = vy # Boids2.3 # 整列行動(alignment) # 分離行動と同じ視野内の個体群の平均速度に合わせるよう速度の方向を変更 alignment: -> # 平均速度計算用 vMean = null n = 0 # 整列行動の方向転換計算用cos/sin cs = Math.cos(Creature._alignmentAngle) sn = Math.sin(Creature._alignmentAngle) # 自分以外の群のすべての個体についてサーチ for other in @cluster.creatures if other != this # その個体が自分の前方にいるなら if other.isInFrontOf(this) d = Vector.distance(this.pos, other.pos) # その個体が視野の中にいるなら if d <= Creature._alignmentFieldDepth # 既に個体が視野内にあれば平均速度の計算を続行 n++ if vMean? vMean.plusEq(other.v) else vMean = new Vector(0, 0) # 視野内に個体がいたなら速度変更の計算へ if vMean? vMean.divEq(n) ### @v.plusEq(vMean) newV = @v.abs() if newV >= Creature._vMax @v.timesEq(vMean.abs() / newV) ### if vMean.isHeadingToRightOf(@v) vx = @v.x * cs + @v.y * sn vy = -@v.x * sn + @v.y * cs else vx = @v.x * cs - @v.y * sn vy = @v.x * sn + @v.y * cs @v.x = vx @v.y = vy # Boidsの群を管理するクラスで、以下を保持する # ・群を構成する複数の個体 # ・個体を描画するcanvasとそのcontextのオブジェクト class Cluster # コンストラクタはcanvasオブジェクトを受け取り、そのcontextをプロパティに登録 constructor: (canvas) -> @creatures = [] @canvas = canvas @context = @canvas.getContext("2d") if @canvas.getContext return # すべての個体オブジェクトを群から削除する clearCreatures: -> @creatures = [] # 引数で与えられた個体を群に加える addCreature: (creature) -> @creatures.push(creature) return # 群の全個体を描画する # 描画エリアをクリアした後、群の全個体のdraw()メソッドを呼び出している draw: -> @context.fillStyle = "#e0e0e0" @context.fillRect(0, 0, @canvas.width, @canvas.height) for creature in @creatures creature.draw(@context) return # 秒単位のインターバル受け取り、すべての個体を移動させる move: (interval_sec) -> for creature in @creatures creature.move(interval_sec) return # Boidsアプリケーションの動作を統括するクラス # 唯一、ブラウザから直接呼び出され、初期値の設定やClusterの操作を担当 class Controler # Boids 1.2からstaticなクラスプロパティとした @interval_sec: 1 # animation frame interval in seconds constructor: (canvas) -> # Boidsの活動領域 @field = new Field(canvas) # 群のオブジェクト @cluster = new Cluster(canvas) # 個体の数 @population = 0 # アニメーション用のフラグとtimer @isRunning = false @timer = undefined # 定数として扱うクラス変数を設定するメソッド群 setVMax: (vMax) -> Creature._vMax = vMax setVMin: (vMin) -> Creature._vMin = vMin setCreatureSize: (size) -> Creature._drawSize = size setWallDetectionLength: (pix) -> Creature._wallDetectionLength = pix setWallRepulsionParam: (param) -> Creature._wallRepulsionParam = param setSeparationFieldDepth: (length) -> Creature._separationFieldDepth = length setSeparationAngle: (angle) -> Creature._separationAngle = angle setCohesionAngle: (angle) -> Creature._cohesionAngle = angle setAlignmentFieldDepth: (length) -> Creature._alignmentFieldDepth = length setAlignmentAngle: (angle) -> Creature._alignmentAngle = angle setIntervalSec: (@interval_sec) -> # 一つの個体を発生させるメソッド # 位置はcanvasに収まるよう、速度はvMax/2~vMaxの範囲でランダム createCreature: -> cr = new Creature(@cluster, @field) x = Math.floor(Math.random() * @field.xMax) y = Math.floor(Math.random() * @field.yMax) v = Math.random() * (Creature._vMax - Creature._vMin) + Creature._vMin a = Math.random() * Math.PI * 2 cr.setPosition(x, y) cr.setVelocity(v * Math.cos(a), v * Math.sin(a)) return cr # 引数で指定された数の個体を発生させ、Clusterオブジェクトに登録する generate: (@population) -> @cluster.clearCreatures() for i in [1..@population] cr = @createCreature() @cluster.addCreature(cr) @cluster.draw() # アニメーションの開始/停止の切り替え # アニメーションはsetInterval()で実装している startAndStop: () -> if @isRunning clearInterval(@timer) @isRunning = false else @timer = setInterval => @cluster.move(@interval_sec) @cluster.draw() return , @interval_sec * 1000 @isRunning = true return # 外部からアクセス可能な名前の設定 Boids23.Controler = Controler # スクリプトが読み込まれた時の実行部分 jQuery ($) -> # Controlerを作成し、canvasオブジェクトを渡す canvas = $("#Boids23_canvas")[0] controler = new Boids23.Controler(canvas) # 固定パラメータのセット # パラメータの値は、Javascript形式でHTMLに埋め込まれている想定 controler.setVMax(BD23_V_MAX) controler.setVMin(BD23_V_MIN) controler.setCreatureSize(BD23_CREATURE_SIZE) controler.setWallDetectionLength(BD23_WALL_DETECTION_LENGTH) controler.setWallRepulsionParam(BD23_WALL_REPULSION_PARAM) controler.setSeparationFieldDepth(BD23_SEPARATION_FIELD_DEPTH) controler.setSeparationAngle(BD23_SEPARATION_ANGLE) controler.setCohesionAngle(BD23_COHESION_ANGLE) controler.setAlignmentFieldDepth(BD23_ALIGNMENT_FIELD_DEPTH) controler.setAlignmentAngle(BD23_ALIGNMENT_ANGLE) controler.setIntervalSec(BD23_INTERVAL_SEC) # Generateボタンが押されたとき、指定された個体数で群をつくる $("#boids23_generate").click -> pop = $("#boids23_population").val() if pop < 1 pop = 1 $("#boids23_population").val(pop) controler.generate(pop) # Start/Stopボタンが押されたとき、アニメーションの動作を切り替える $("#boids23_start_and_stop").click -> controler.startAndStop() |
Boids 2.2では、分離(Separation)に加えて「結合(Cohesion)」のルールを導入する。結合行動の考え方は、ここでは以下の通りとした。
次図において、進行方向に直角な直線hより前方側の個体が存在する場合、それらの重心位置gを計算する。

なお、視野角の前方判定はベクトルの前後判定によって行っている。
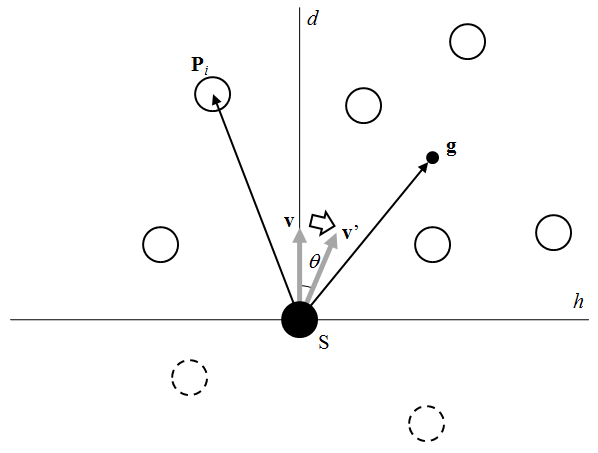
先の図のように、自身の進行方向に対する群の重心の位置によって、以下の手順で進路を変更する。
これらの考え方はBoids 2.1の分離行動における回避動作と同じ。
HTMLで定義する初期パラメータに、結合に関する以下の変数を追加する。
BD22_COHESION_ANGLE)|
1 2 3 4 5 6 7 8 9 10 11 12 13 |
<script> //<![CDATA[ BD22_V_MAX = 100; BD22_CREATURE_SIZE = 10; BD22_WALL_DETECTION_LENGTH = 100; BD22_WALL_REPULSION_PARAM = 16; BD22_VIEW_FIELD_LENGTH = 50; BD22_SEPARATION_ANGLE = 10 * Math.PI / 180; // Boids 2.2で追加:結合行動の速度の向きを変更する角 BD22_COHESION_ANGLE = 5 * Math.PI / 180; BD22_INTERVAL_SEC = 0.05; //]]> </script> |
初期パラメータの保存のため、Creatureクラスのクラス変数を追加する。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
class Creature extends MovingAgent # private staticなクラス・プロパティ # 最大速度 @_vMax: 100 # 描画の基本となるサイズ @_drawSize: 8 # 壁の衝突回避を認識する距離 @_wallDetectionLength: 100 # 反発力パラメータ @_wallRepulsionParam: 4 # 視野の長さ(奥行) @_viewFieldLength: 100 # 分離行動の回避角 @_separationAngle: 0 # 結合行動の回避角 @_cohesionAngle: 0 |
Controlerクラスに、Creatureクラス変数へのセッターを定義する。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 |
class Controler ..... # 定数として扱うクラス変数を設定するメソッド群 setVMax: (vMax) -> Creature._vMax = vMax setCreatureSize: (size) -> Creature._drawSize = size setWallDetectionLength: (pix) -> Creature._wallDetectionLength = pix setWallRepulsionParam: (param) -> Creature._wallRepulsionParam = param setViewFieldLength: (length) -> Creature._viewFieldLength = length setSeparationAngle: (angle) -> Creature._separationAngle = angle setCohesionAngle: (angle) -> Creature._cohesionAngle = angle setIntervalSec: (@interval_sec) -> |
HTMLで定義されたパラメータをControlerオブジェクトのセッターによってセットする。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
# スクリプトが読み込まれた時の実行部分 jQuery ($) -> # Controlerを作成し、canvasオブジェクトを渡す canvas = $("#Boids22_canvas")[0] controler = new Boids22.Controler(canvas) # 固定パラメータのセット # パラメータの値は、Javascript形式でHTMLに埋め込まれている想定 controler.setVMax(BD22_V_MAX) controler.setCreatureSize(BD22_CREATURE_SIZE) controler.setWallDetectionLength(BD22_WALL_DETECTION_LENGTH) controler.setWallRepulsionParam(BD22_WALL_REPULSION_PARAM) controler.setViewFieldLength(BD22_VIEW_FIELD_LENGTH) controler.setSeparationAngle(BD22_SEPARATION_ANGLE) controler.setCohesionAngle(BD22_COHESION_ANGLE) controler.setIntervalSec(BD22_INTERVAL_SEC) ..... |
Creatureクラスのmove()メソッドがcohesion()メソッドを呼び出すようにする。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
class Creature extends MovingAgent ..... move: (interval_sec) -> # 壁を避ける @wallAvoidance() # 分離行動(separation) @separation() # 結合行動(cohesion) @cohesion() ..... |
coheion()メソッドを新たに定義する。
cs、snを定義しているclusterCenterプロパティに保存されるが、視野内に個体が存在しないときはnullとなる|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 |
# Boids2.2 # 結合行動(cohesion) # 前方視角180度以内の全個体の重心に向かって速度を少し変更する cohesion: -> # 群のうち認識した個体の数とそのグループの重心 n = 0 clusterCenter = null # 結合行動の方向転換計算用cos/sin cs = Math.cos(Creature._cohesionAngle) sn = Math.sin(Creature._cohesionAngle) # 自分以外の群のすべての個体についてサーチ for other in @cluster.creatures if other != this # 相手が自身の前方にいるなら、その位置を考慮 if other.isInFrontOf(this) n++ if clusterCenter? clusterCenter.plusEq(other.pos) else clusterCenter = new Vector(other.pos.x, other.pos.y) # 前方の相手が1つでも存在すれば、結合行動をとる if clusterCenter? clusterCenter.divEq(n) # 重心が自分の右にあれば左に、自分の左にあれば右に進路を変更 if clusterCenter.isOnTheRightOf(this) vx = @v.x * cs + @v.y * sn vy = -@v.x * sn + @v.y * cs else vx = @v.x * cs - @v.y * sn vy = @v.x * sn + @v.y * cs @v.x = vx @v.y = vy |
Boids 2.1では、いよいよBoidsのルールの一つ「分離(Separation)」を導入する。分離行動の考え方は、ここでは以下の通りとした。
個体は自身の進行方向の左右90度以内、180度の視野角を持ち、その視野角内で一定距離以内の個体に反応するものとする。
視野内外の判定の概念は下図の通りで、個体Pは視野内と判定され、個体Qは視野外として無視される。
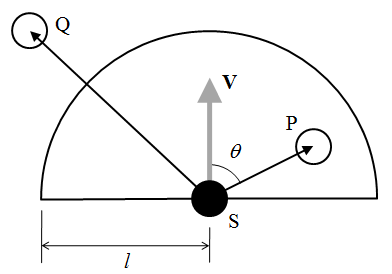
視野内外判定の手順は以下の通り。
 ならば次へ進む
ならば次へ進む回避対象が自身の進路の右にいるなら左に、進路の左にいるなら右に、方向ベクトルの角度を変更する。進路変更の角度は予め設定しておく。
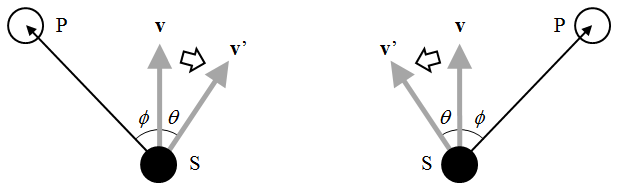
回避動作の手順は以下の通り。
ここで方向ベクトルの変化量θは予め設定しておき、これに対応するcos、sinによる回転行列を適用して方向を変える。cos、sinの値は、できるだけ計算量が少なくなるようにする。
HTMLで定義する初期パラメータに、分離に関する以下の変数を追加する。
BD21_VIEW_FIELD_LENGTH)BD21_SEPARATION_ANGLE)|
1 2 3 4 5 6 7 8 9 10 11 12 13 |
<script> //<![CDATA[ BD21_V_MAX = 100; BD21_CREATURE_SIZE = 10; BD21_WALL_DETECTION_LENGTH = 100; BD21_WALL_REPULSION_PARAM = 16; // Boids 2.1で追加:視野の深さ BD21_VIEW_FIELD_LENGTH = 100; // Boids 2.1で追加:分離行動の速度の向きを変更する角 BD21_SEPARATION_ANGLE = 10 * Math.PI / 180; BD21_INTERVAL_SEC = 0.05; //]]> </script> |
初期パラメータの保存のため、Creatureクラスのクラス変数を追加する。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
class Creature extends taustation_geom2d.MovingAgent # private staticなクラス・プロパティ # 最大速度 @_vMax: 100 # 描画の基本となるサイズ @_drawSize: 8 # 壁の衝突回避を認識する距離 @_wallDetectionLength: 100 # 反発力パラメータ @_wallRepulsionParam: 4 # 視野の長さ(奥行) @_viewFieldLength: 100 # 分離行動の回避計算用 @_separationAngle: 0 |
Controlerクラスに、Creatureクラス変数へのセッターを定義する。
|
1 2 3 4 5 6 7 8 9 10 11 12 |
class Controler ..... # 定数として扱うクラス変数を設定するメソッド群 setVMax: (vMax) -> Creature._vMax = vMax setCreatureSize: (size) -> Creature._drawSize = size setWallDetectionLength: (pix) -> Creature._wallDetectionLength = pix setWallRepulsionParam: (param) -> Creature._wallRepulsionParam = param setViewFieldLength: (length) -> Creature._viewFieldLength = length setSeparationAngle: (angle) -> Creature._separationAngle = angle setIntervalSec: (@interval_sec) -> |
HTMLで定義されたパラメータをControlerオブジェクトのセッターによってセットする。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
jQuery ($) -> # Controlerを作成し、canvasオブジェクトを渡す canvas = $("#Boids21_canvas")[0] controler = new Boids21.Controler(canvas) # 固定パラメータのセット # パラメータの値は、Javascript形式でHTMLに埋め込まれている想定 controler.setVMax(BD21_V_MAX) controler.setCreatureSize(BD21_CREATURE_SIZE) controler.setWallDetectionLength(BD21_WALL_DETECTION_LENGTH) controler.setWallRepulsionParam(BD21_WALL_REPULSION_PARAM) controler.setViewFieldLength(BD21_VIEW_FIELD_LENGTH) controler.setSeparationAngle(BD21_SEPARATION_ANGLE) controler.setIntervalSec(BD21_INTERVAL_SEC) # Generateボタンが押されたとき、指定された個体数で群をつくる $("#boids21_generate").click -> pop = $("#boids21_population").val() if pop < 1 pop = 1 $("#boids21_population").val(pop) controler.generate(pop) # Start/Stopボタンが押されたとき、アニメーションの動作を切り替える $("#boids21_start_and_stop").click -> controler.startAndStop() |
Creatureクラスのmove()メソッドがseparation()メソッドを呼び出すようにする。
|
1 2 3 4 5 6 7 8 9 10 11 12 |
class Creature extends MovingAgent ..... move: (interval_sec) -> # 壁を避ける @wallAvoidance() # 分離行動(separation) @separation() ..... |
separation()メソッドを新たに定義する。
cs、snを定義しているnearestCreatureプロパティに保存されるが、視野内に個体が存在しないときはnullとなる|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
# Boids2.1 # 分離行動(separation) # 前方視角180度内で一定距離内の視野の中で、最も近い個体を避ける # 相手方の速度の向きには関係なく、相手側と反対方向に速度の向きをを少し変更する。 separation: -> # 回避行動の方向転換計算用cos/sin cs = Math.cos(Creature._separationAngle) sn = Math.sin(Creature._separationAngle) # 自身に最も近い個体 @nearestCreature = null # 自分以外の群のすべての個体についてサーチ for other in @cluster.creatures if other != this # その個体が自分の前方にいるなら if other.isInFrontOf(this) d = Vector.distance(this.pos, other.pos) # その個体が視野の中にいるなら if d <= Creature._viewFieldLength # 既に個体がセットされていて、今回の個体の方が近ければ入れ替え # 最初に認識した個体ならそのままセット if @nearestCreature? if d <= Vector.distance(@nearestCreature.pos, this.pos) @nearestCreature = other else @nearestCreature = other # 近くの個体が視野内に存在するなら回避計算 if @nearestCreature? # 相手が自分の右にいるなら左へ、自分の左にいるなら右へ向きを変更 if @nearestCreature.isOnTheRightOf(this) vx = @v.x * cs - @v.y * sn vy = @v.x * sn + @v.y * cs else vx = @v.x * cs + @v.y * sn vy = -@v.x * sn + @v.y * cs @v.x = vx @v.y = vy |
Boids 2.0は以後のBoids 2.xシリーズの土台となるもので、Boids 1.2に対して以下を変更している。
Creatureクラスのうち、位置と速度の保持、互いの位置関係の判定に関する性質を汎用のMovingAgentクラスとしてまとめ、taustation-geo2dパッケージに含めたCreatureクラスはMovingAgentクラスを継承し、それらのメソッドを利用する。
|
1 |
class Creature extends MovingAgent |
MovingAgentのプロパティを継承するため、位置と速度の指定が変更。たとえばCreatureクラスのインスタンスがcreatureだとすると、以下のようになる。
creature:pos.xcreature:pos.ycreature:v.xcreature:v.y各種パラメータの設定を、CoffeeScriptの再コンパイルやアップロードをしなくても、HTMLで設定・変更できるようにした。
Controlerクラスのメソッドとして集約
Creatureのクラス変数ControlerクラスのプロパティControlerオブジェクトのセッターにグローバル・パラメータ変数を渡してパラメータ設定HTMLにパラメータをグローバル変数としてスクリプト記述。
注意点は、スクリプトはJavascriptにコンパイルされているので、直接読み込まれるグローバル変数もJavascriptの変数として書くこと。特に各定義の文末にセミコロン(;)を付けること。
|
1 2 3 4 5 6 7 8 9 |
<script> //<![CDATA[ BD20_V_MAX = 100; BD20_CREATURE_SIZE = 10; BD20_WALL_DETECTION_LENGTH = 100; BD20_WALL_REPULSION_PARAM = 16; BD20_INTERVAL_SEC = 0.05; //]]> </script> |
上記のパラメータのうち、個体の運動に関わるものを、Creatureクラスのクラス変数として定義。
なお、アニメーションのフレーム・インターバル(interval_sec)は、Controlerクラスのクラス変数として定義している。
|
1 2 3 4 5 6 7 8 9 10 |
class Creature extends taustation_geom2d.MovingAgent # private staticなクラス・プロパティ # 最大速度 @_vMax: 100 # 描画の基本となるサイズ @_drawSize: 8 # 壁の衝突回避を認識する距離 @_wallDetectionLength: 100 # 反発力パラメータ @_wallRepulsionParam: 4 |
上記のクラス変数にパラメータをセットするセッターを、Controlerクラスのメソッドとして集約。
|
1 2 3 4 5 6 7 8 9 10 |
class Controler ..... # 定数として扱うクラス変数を設定するメソッド群 setVMax: (vMax) -> Creature._vMax = vMax setCreatureSize: (size) -> Creature._drawSize = size setWallDetectionLength: (pix) -> Creature._wallDetectionLength = pix setWallRepulsionParam: (param) -> Creature._wallRepulsionParam = param setIntervalSec: (@interval_sec) -> |
スクリプト実行時に、上記セッターを通してグローバル変数のパラメータを設定する。
|
1 2 3 4 5 6 7 8 9 10 11 |
jQuery ($) -> ..... # 固定パラメータのセット # パラメータの値は、Javascript形式でHTMLに埋め込まれている想定 controler.setVMax(BD20_V_MAX) controler.setCreatureSize(BD20_CREATURE_SIZE) controler.setWallDetectionLength(BD20_WALL_DETECTION_LENGTH) controler.setWallRepulsionParam(BD20_WALL_REPULSION_PARAM) controler.setIntervalSec(BD20_INTERVAL_SEC) |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 |
# Boids 2.1 # Boids 2.0 = 1.2に基づいて、分離(separation)ルールを導入する。 Boids20 = {} # パッケージBoids20の本体 do -> # 独自クラスのエイリアス # パッケージtaustation_geom2d.jsが必要。 Vector = taustation_geom2d.Vector MovingAgent = taustation_geom2d.MovingAgent # Boidsが活動する空間のクラス # このバージョンでは、canvasオブジェクトの上下左右の座標を持つ長方形 class Field constructor: (canvas) -> @xMin = 0 @yMin = 0 @xMax = canvas.width @yMax = canvas.height # Boidsの個体を実現するクラス # 位置座標と速度ベクトルの成分を保持する # 自らが活動するFieldクラスのオブジェクトへの参照も保持する class Creature extends taustation_geom2d.MovingAgent # private staticなクラス・プロパティ # 最大速度 @_vMax: 100 # 描画の基本となるサイズ @_drawSize: 8 # 壁の衝突回避を認識する距離 @_wallDetectionLength: 100 # 反発力パラメータ @_wallRepulsionParam: 4 # コンストラクタの引数にはFieldオブジェクトを渡す # 位置、速度、加速度、自分が属する群、Fieldをプロパティとして持つ constructor: (cluster, field) -> super() @a = new Vector(0, 0) @cluster = cluster @field = field @nearestCreature = null # 個体を描画するメソッド # canvasのコンテキストを引数で受け取る draw: (ctx) -> v = @v.abs() sx = Creature._drawSize * @v.x / v sy = Creature._drawSize * @v.y / v p = 0.25 ctx.fillStyle = "black" ctx.beginPath() ctx.moveTo(@pos.x + (1 - p) * sx, @pos.y + (1 - p) * sy) ctx.lineTo(@pos.x + (-sx - sy) * p, @pos.y + (sx - sy) * p) ctx.lineTo(@pos.x + (-sx + sy) * p, @pos.y + (-sx - sy) * p) ctx.closePath() ctx.fill() return # 個体を動かすメソッド # 「群れ」を表すClusterクラスのmove()メソッドから呼ばれる # interval_secは秒単位のアニメーション・フレームのインターバル move: (interval_sec) -> # 壁を避ける @wallAvoidance() # 加速度を考慮した速度の変化を計算 # 速度の絶対値が増え続けないようにキャップで抑える # 速度成分の符号を得るのに、Math.signがサポートされていないブラウザが多いため、 # 値/絶対値で符号を得ている @v.plusEq(@a.times interval_sec) @v.x = @v.x / Math.abs(@v.x) * Math.min(Math.abs(@v.x), Creature._vMax) @v.y = @v.y / Math.abs(@v.y) * Math.min(Math.abs(@v.y), Creature._vMax) # インターバルの間の移動量を計算 @pos.plusEq(@v.times interval_sec) # 壁にぶつかった場合は全反射 if @pos.x <= @field.xMin or @pos.x >= @field.xMax then @v.x = -@v.x if @pos.y <= @field.yMin or @pos.y >= @field.yMax then @v.y = -@v.y return # 壁を避ける行動 # 壁からの距離に応じた斥力を(repulsion)想定し、x/y方向の加速度を計算 wallAvoidance: -> if @pos.x <= Creature._wallDetectionLength @a.x = Creature._wallRepulsionParam * (Creature._wallDetectionLength / @pos.x) ** 2 else if @pos.x >= @field.xMax - Creature._wallDetectionLength @a.x = -Creature._wallRepulsionParam * (Creature._wallDetectionLength / (@field.xMax - @pos.x)) ** 2 else @a.x = 0 if @pos.y <= Creature._wallDetectionLength @a.y = Creature._wallRepulsionParam * (Creature._wallDetectionLength / @pos.y) ** 2 else if @pos.y >= @field.yMax - Creature._wallDetectionLength @a.y = -Creature._wallRepulsionParam * (Creature._wallDetectionLength / (@field.yMax - @pos.y)) ** 2 else @a.y = 0 # Boidsの群を管理するクラスで、以下を保持する # ・群を構成する複数の個体 # ・個体を描画するcanvasとそのcontextのオブジェクト class Cluster # コンストラクタはcanvasオブジェクトを受け取り、そのcontextをプロパティに登録 constructor: (canvas) -> @creatures = [] @canvas = canvas @context = @canvas.getContext("2d") if @canvas.getContext return # すべての個体オブジェクトを群から削除する clearCreatures: -> @creatures = [] # 引数で与えられた個体を群に加える addCreature: (creature) -> @creatures.push(creature) return # 群の全個体を描画する # 描画エリアをクリアした後、群の全個体のdraw()メソッドを呼び出している draw: -> @context.fillStyle = "#e0e0e0" @context.fillRect(0, 0, @canvas.width, @canvas.height) for creature in @creatures creature.draw(@context) return # 秒単位のインターバル受け取り、すべての個体を移動させる move: (interval_sec) -> for creature in @creatures creature.move(interval_sec) return # Boidsアプリケーションの動作を統括するクラス # 唯一、ブラウザから直接呼び出され、初期値の設定やClusterの操作を担当 class Controler # Boids 1.2からstaticなクラスプロパティとした @interval_sec: 1 # animation frame interval in seconds constructor: (canvas) -> # Boidsの活動領域 @field = new Field(canvas) # 群のオブジェクト @cluster = new Cluster(canvas) # 個体の数 @population = 0 # アニメーション用のフラグとtimer @isRunning = false @timer = undefined # 定数として扱うクラス変数を設定するメソッド群 setVMax: (vMax) -> Creature._vMax = vMax setCreatureSize: (size) -> Creature._drawSize = size setWallDetectionLength: (pix) -> Creature._wallDetectionLength = pix setWallRepulsionParam: (param) -> Creature._wallRepulsionParam = param setIntervalSec: (@interval_sec) -> # 一つの個体を発生させるメソッド # 位置はcanvasに収まるよう、速度はvMax/2~vMaxの範囲でランダム createCreature: -> cr = new Creature(@cluster, @field) x = Math.floor(Math.random() * @field.xMax) y = Math.floor(Math.random() * @field.yMax) v = (Math.random() + 1) * Creature._vMax / 2 a = Math.random() * Math.PI * 2 cr.setPosition(x, y) cr.setVelocity(v * Math.cos(a), v * Math.sin(a)) return cr # 引数で指定された数の個体を発生させ、Clusterオブジェクトに登録する generate: (@population) -> @cluster.clearCreatures() for i in [1..@population] cr = @createCreature() @cluster.addCreature(cr) @cluster.draw() # アニメーションの開始/停止の切り替え # アニメーションはsetInterval()で実装している startAndStop: () -> if @isRunning clearInterval(@timer) @isRunning = false else @timer = setInterval => @cluster.move(@interval_sec) @cluster.draw() return , @interval_sec * 1000 @isRunning = true return # 外部からアクセス可能な名前の設定 Boids20.Controler = Controler # スクリプトが読み込まれた時の実行部分 jQuery ($) -> # Controlerを作成し、canvasオブジェクトを渡す canvas = $("#Boids20_canvas")[0] controler = new Boids20.Controler(canvas) # 固定パラメータのセット # パラメータの値は、Javascript形式でHTMLに埋め込まれている想定 controler.setVMax(BD20_V_MAX) controler.setCreatureSize(BD20_CREATURE_SIZE) controler.setWallDetectionLength(BD20_WALL_DETECTION_LENGTH) controler.setWallRepulsionParam(BD20_WALL_REPULSION_PARAM) controler.setIntervalSec(BD20_INTERVAL_SEC) # Generateボタンが押されたとき、指定された個体数で群をつくる $("#boids20_generate").click -> pop = $("#boids20_population").val() if pop < 1 pop = 1 $("#boids20_population").val(pop) controler.generate(pop) # Start/Stopボタンが押されたとき、アニメーションの動作を切り替える $("#boids20_start_and_stop").click -> controler.startAndStop() |
Boids 2.xシリーズでは、Boids 1.xで準備した土台となるコードに、個体の行動ルール(分離、結合、整列)を一つずつ実装していく。
Creatureクラスから汎用のMovingAgentクラスを分離して、これを継承基本コードの挙動はBoids 1.2と同じで、各個体は壁との衝突を避けながら自由に動くが、他の個体は意識しない。
個体同士の衝突を避けるように進路を変更する行動ルールを適用する。他の個体が接近したときに、それぞれが進路を変更している様子がわかる。
各個体が、視野内の群の重心に向かって進路を変更するルールを適用する。全体として群を形成しようとする様子がわかる。
各個体が、視野内の群の全体としての移動方向に自分の進路を合わせるよう変更するルールを適用する。群が全体として同じ方向に動こうとしている様子がわかる。
taustation_geom2d.MovingAgent
自分の位置を表すVectorオブジェクトと移動速度を表すVectorオブジェクトを要素に持ち、他のMovingAgentとの位置関係を判定するメソッドを準備している。
なお、Vectorクラスには、Vectorを位置ベクトルとしたときに、その点とMovingAgentとの位置関係を表すメソッドが用意されている。
なし
なし
constructor()setPosition(x, y)setVelocity(vx, vy)getClone()isInFrontOf(other)isIntheRearOf(other)isOnTheRightOf(other)isOnTheLeftOf(movingAgent)|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
class MovingAgent constructor: -> @pos = new Vector(0, 0) @v = new Vector(0, 0) return # 個体の位置をセットするメソッド setPosition: (x, y) -> @pos.x = x @pos.y = y return # 個体の速度をセットするメソッド setVelocity: (vx, vy) -> @v.x = vx @v.y = vy return # 自身と同じ内容のMovingAgentオブジェクトを生成して返す getClone: -> clone = new MovingAgent() clone.setPosition(@pos.x, @pos.y) clone.setVelocity(@v.x, @v.y) return clone # 以下、他のMovingAgentとの位置関係 # # このMovingAgentが引数のMovingAgentの前方か isInFrontOf: (other) -> inprod = other.v.x * (@pos.x - other.pos.x) + other.v.y * (@pos.y - other.pos.y) if inprod >= 0 then true else false # このMovingAgentが引数のMovingAgentの後方か isInTheRearOf: (other) -> not @isInFrontOf(other) # このMovingAgentが引数のMovingAgentの右方か isOnTheRightOf: (other) -> inprod = other.v.y * (@pos.x - other.pos.x) - other.v.x * (@pos.y - other.pos.y) if inprod >= 0 then true else false # このMovingAgentが引数のMovingAgentの左方か isOnTheLeftOf: (other) -> not @isOnTheRightOf(other) |
たとえば2次元の直線のパラメータ表示は、以下のように一つのパラメータtに対してxとyが計算される方法。

直線が通過すべき点(px, py)と、直線の方向(vx, vy)が与えられた場合のパラメータ表示を決定する。
通過点でパラメータがt = 0とすればpxとpyが定まり、tが1単位増えた時のxとyの増分が直線の方向に対応することから、以下のように表される。

なおこれらを、パラメータtに対応した直線状の点の位置ベクトル 、通過点の位置ベクトル
、通過点の位置ベクトル 、方向ベクトル
、方向ベクトル で表示すると下記のようになる。
で表示すると下記のようになる。
![\[{\bf x} = {\bf v} t + {\bf p}\]](http://taustation.com/wp1/wp-content/ql-cache/quicklatex.com-22c1580abd77b8da854839168a009dd3_l3.png "Rendered by QuickLaTeX.com")
2つの点p(px, py)とq(qx, qy)が与えられた場合の直線のパラメータ表示を決定する。
点pでt = 0、点qでt = 1とすれば、以下の式が得られる。

これをベクトル表示すれば以下の通り。
![\[{\bf x} = ( {\bf q} - {\bf p} ) t + {\bf p}\]](http://taustation.com/wp1/wp-content/ql-cache/quicklatex.com-bffc99ae09f11b5003cef976da3b7e6f_l3.png "Rendered by QuickLaTeX.com")
一般に直線の式は以下で与えられる。
![\[ax + by + c = 0\]](http://taustation.com/wp1/wp-content/ql-cache/quicklatex.com-d6669e1ae42cc660f08ff567578c9ff2_l3.png "Rendered by QuickLaTeX.com")
一方で媒介変数された直線の式からパラメーターを消去すると以下のようになる。
![\[\frac{x - p_x}{v_x} = \frac{y - p_y}{v_y}\]](http://taustation.com/wp1/wp-content/ql-cache/quicklatex.com-4c6865f412510ed62db5fee6baa9ee20_l3.png "Rendered by QuickLaTeX.com")
これを変形すると、先の直線の式との対応関係がわかる。
![\[v_y x - v_x y -v_x p_x + v_y p_y = 0\]](http://taustation.com/wp1/wp-content/ql-cache/quicklatex.com-d6043e5cde797239480f7848c88440a2_l3.png "Rendered by QuickLaTeX.com")
以下の2つの直線の交点を求める。

これを要素表示に展開する。

ここでx1 = x2、y1 = y2と置いて、t1、t2を未知数とした以下の方程式を得る。

この方程式を行列で表示すると以下の通り。
![\[\left[ \begin{array}{cc} v_{1x} & -v_{2x} \\ v_{1y} & -v_{2y} \end{array} \right] \left[ \begin{array}{c} t_1 \\ t_2 \end{array} \right] = \left[ \begin{array}{c} p_{2x} - p_{1x} \\ p_{2y} - p_{1y} \end{array} \right] = \left[ \begin{array}{c} \Delta p_x \\ \Delta p_y \end{array} \right]\]](http://taustation.com/wp1/wp-content/ql-cache/quicklatex.com-ef97098a78b1acd2e392dd0142a0e07e_l3.png "Rendered by QuickLaTeX.com")
これを解いて以下を得る。

これらの式は分母がゼロのときは解をもたないが、これは と
と を90度回転させたベクトルが直角であること、すなわち2つの直線の方向が平行であることを示している。
を90度回転させたベクトルが直角であること、すなわち2つの直線の方向が平行であることを示している。
さらに2つの直線がまったく一致するときは、分母・分子ともゼロとなり、解は不定となる。
ここで、交点の座標を確認する。

当然この結果は、パラメータ表示の2直線からパラメータt1、t2を消去して陰関数表示をした以下の方程式の解と一致する。

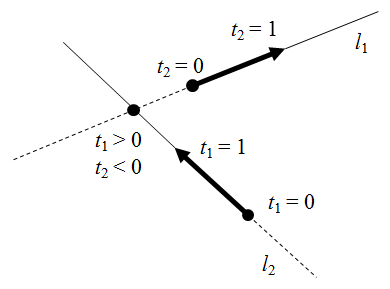
パラメータ表示の場合、基準点においてt = 0とし、方向ベクトルの先、あるいはそれに相当する2つ目の点においてt = 1などとすれば、基準点から方向ベクトルの先のtは正の値、逆方向ではtが負の値になる。
これを利用して、二つの直線の交点が基準点より前方/後方どちらの側にあるか、あるいは半直線に交点が存在するか、といった判定が容易に可能となる。
ベクトルの内積の表現には、要素表示を用いたものと幾何的なものの2つがある。

2つの表現が等価であることを証明するのに、下図のように2つのベクトルで張られた三角形の の長さを考える。
の長さを考える。
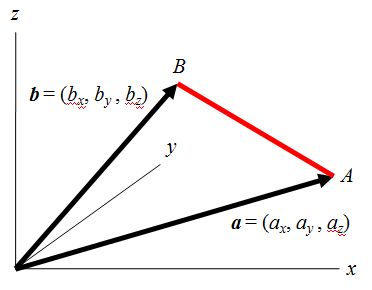
まずベクトルの成分で計算した場合は、

また余弦定理を用いて計算した場合は、 として以下のようになる。
として以下のようになる。

上記2つが等しいことから、以下が得られる。

2次元の場合は、z成分を0とおいてx成分とy成分のみについて考えればよい。