相加相乗平均の不等式
一般系
(1) ![\begin{equation*} a_i \ge 0 \quad \Rightarrow \quad \sum_{i=1}^{n} a_i \ge n \sqrt[n]{\prod_{i=1}^{n} a_i} \end{equation*}](http://taustation.com/wp1/wp-content/ql-cache/quicklatex.com-7316e733b885728513bce2577cd689f4_l3.png "Rendered by QuickLaTeX.com")
2項の場合
(2) 
コーシー・シュワルツの不等式
(3) 
2項の場合
(4) 
直線 、点
、点 の距離を考える。直線と各点の記号、座標を以下のように定義する。
の距離を考える。直線と各点の記号、座標を以下のように定義する。
(1) 
まず、ベクトル が直線に直交することを示す。直線は以下のように媒介変数表示できて、ベクトル
が直線に直交することを示す。直線は以下のように媒介変数表示できて、ベクトル は直線に平行なベクトル。
は直線に平行なベクトル。
(2) 
これを直線の式に代入して、
(3) 
ここで任意の に対して上式が成り立つことから、
に対して上式が成り立つことから、 となり、ベクトルは直線に垂直であることが示された。
となり、ベクトルは直線に垂直であることが示された。
別解:点と直線の距離をパラメーター(媒介変数)によって愚直に求める方法
与えられた点 から直線への垂線の足を
から直線への垂線の足を とすると、
とすると、 なので、以下が成り立つ。
なので、以下が成り立つ。
(4) 
ここで は直線上にあることを考慮し、上式の左辺を以下のように変形できる。
は直線上にあることを考慮し、上式の左辺を以下のように変形できる。
(5) 
これより
(6) 
3次元空間内の平面は、たとえば以下のように表すことができる。
(7) 
一方、3次元平面上の点と法線ベクトル との直行条件から、以下のようにも表現できる。
との直行条件から、以下のようにも表現できる。
(8) 
上記2つの式より、ベクトル は平面に対する法線ベクトルであることがわかる。
は平面に対する法線ベクトルであることがわかる。
この法線ベクトルがベクトル と平行であることから、
と平行であることから、
(9) 
上式の左辺は以下のように変形できる。
(10) 
以上のことから、点 から三次元平面
から三次元平面 への距離については、以下で表される。
への距離については、以下で表される。
(11) 
n次元の超平面を以下の式で与える。
(12) 
このとき、これまでと同様の考え方により、点 と上記の超平面との距離は以下で表される。
と上記の超平面との距離は以下で表される。
(13) 
ベクトルはnp.array()で引数にリストを指定して定義。
|
1 2 3 4 |
v = np.array([1, 2, 3]) print(v) # [1 2 3] |
行列は同じくnp.array()で引数に二次元配列のリストを指定して定義。
|
1 2 3 4 5 |
m = np.array([[1, 2, 3], [4, 5, 6]]) print(m) # [[1 2 3] # [4 5 6]] |
numpy.identity(n)でn×nの単位行列を生成。
|
1 2 3 4 5 6 |
print(np.identity(4)) # [[1. 0. 0. 0.] # [0. 1. 0. 0.] # [0. 0. 1. 0.] # [0. 0. 0. 1.]] |
行列の転置にはtranspose()メソッドを使う。代替として.Tとしてもよい。
|
1 2 3 4 5 6 7 8 9 10 |
m = np.array([[1, 2, 3], [4, 5, 6]]) print(m.transpose()) print(m.T) # [[1 4] # [2 5] # [3 6]] # [[1 4] # [2 5] # [3 6]] |
一次元配列で定義したベクトルにはtranspose()は効かない。列ベクトルに変換するにはreshape()メソッドを使う(reshape(行数, 列数))。
|
1 2 3 4 5 6 7 8 |
v = np.array([1, 2, 3]) print(v.T) print(v.reshape(3, 1)) # [1 2 3] # [[1] # [2] # [3]] |
ベクトル・行列の定数倍は、各要素の定数倍。
|
1 2 3 4 5 6 7 8 9 10 |
a = 2 v = np.array([1, 2, 3]) m = np.array([[1, 2, 3], [4, 5, 6]]) print(a*v) print(a*m) # [2 4 6] # [[ 2 4 6] # [ 8 10 12]] |
同じ要素数のベクトル、同じ次元の行列同士の下限は要素同士の加減
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
a = np.array([1, 2, 3]) b = np.array([2, 4, 6]) A = np.array([[1, 2], [3, 4]]) B = np.array([[2, 4], [6, 8]]) print(a + b) print(a - b) print(A + B) print(A - B) # [3 6 9] # [-1 -2 -3] # [[ 3 6] # [ 9 12]] # [[-1 -2] # [-3 -4]] |
同じ要素数のベクトルの内積(ドット積)はnp.dot()で計算。

|
1 2 3 4 5 |
a = np.array([1, 2, 3]) b = np.array([4, 5, 6]) print(np.dot(a, b)) # 32 |
*演算子を使うと、要素ごとの積になる。
|
1 2 3 |
print(a*b) # [ 4 10 18] |
行列同士の積もnp.dot()で計算。l×m行列とm×n行列の積はl×n行列になる。

|
1 2 3 4 5 6 7 8 9 |
A = np.array([[1, 2, 3], [4, 5, 6]]) B = np.array([[1, 2], [3, 4], [5, 6]]) print(np.dot(A, B)) # [[22 28] # [49 64]] |
次元数が整合しないとエラーになる。
|
1 2 3 4 5 6 7 |
A = np.array([[1, 2, 3], [4, 5, 6]]) B = np.array([[1, 2], [3, 4]]) print(np.dot(A, B)) # ValueError: shapes (2,3) and (2,2) not aligned: 3 (dim 1) != 2 (dim 0) |
行ベクトルと行列の積は、ベクトルを前からかけてok。

|
1 2 3 4 5 6 7 |
a = np.array([1, 2, 3]) A = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9]]) print(np.dot(a, A)) # [30 36 42] |
行列と列ベクトルの積は、一次元配列のベクトルをreshape()で列ベクトルに変換してから。

|
1 2 3 4 5 6 7 8 9 |
A = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9]]) a = np.array([1, 2, 3]).reshape(3, 1) print(np.dot(A, a)) # [[14] # [32] # [50]] |
なお、np.dot()の代わりに演算子@が使える。ベクトル同士なら内積、少なくともいずれか一つが行列なら行列積。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
a = np.array([1, 2]) b = np.array([1, 2, 3]).reshape(3, 1) A = np.array([[1, 2, 3], [4, 5, 6]]) B = np.array([[1, 2], [3, 4], [5, 6]]) print(a @ a) print(a @ A) print(A @ b) print(A @ B) # 5 # [ 9 12 15] # [[14] # [32]] # [[22 28] # [49 64]] |
行列式はnumpy.linalgパッケージのdet()関数で得られる。linalgは”linear algebra”の略で、慣例としてLAという名前で代替される。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 |
import numpy.linalg as LA A = np.array([[1, 2], [3, 4]]) B = np.array([[1, 2, 3], [2, 1, 3], [3, 1, 2]]) print(LA.det(A)) print(LA.det(B)) # -2.0000000000000004 # 6.000000000000001 |
逆行列はnumpy.linalgパッケージのinv()関数で得られる。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
A = np.array([[1, 2], [3, 4]]) B = np.array([[1, 2, 3], [2, 1, 3], [3, 1, 2]]) print(LA.inv(A)) print(LA.inv(B)) # [[-2. 1. ] # [ 1.5 -0.5]] # [[-0.16666667 -0.16666667 0.5 ] # [ 0.83333333 -1.16666667 0.5 ] # [-0.16666667 0.83333333 -0.5 ]] |
正方行列の固有値と固有ベクトルを、eig()関数で得ることができる(行列の固有値・固有ベクトルの例題を用いた)。
|
1 2 3 4 5 6 |
A = np.array([[3, 1], [2, 4]]) print(LA.eig(A)) # (array([2., 5.]), array([[-0.70710678, -0.4472136 ], # [ 0.70710678, -0.89442719]])) |
結果は固有値が並んだベクトルと固有ベクトルが並んだ配列で、それぞれを取り出して利用する。なお、固有ベクトルはノルムが1となるように正規化されている。
|
1 2 3 4 5 6 7 |
eigenvalues, eigenvectors = LA.eig(A) print(eigenvalues) print(eigenvectors) # [2. 5.] # [[-0.70710678 -0.4472136 ] # [ 0.70710678 -0.89442719]] |
注意が必要なのは固有ベクトルの方で、各固有ベクトルは配列の列ベクトルとして並んでいる。固有ベクトルを取り出す方法は2通り。
固有値に対応するサフィックスで列ベクトルを取り出す。この方法はnumpyの公式ドキュメントにも以下のように書かれている。
|
1 2 3 |
print(eigenvectors[:,0], eigenvectors[:,1]) # [-0.70710678 0.70710678] [-0.4472136 -0.89442719] |
固有ベクトルの配列を転置して、行ベクトルの並びにする。
|
1 2 3 4 |
eigenvectors = eigenvectors.T print(eigenvectors[0], eigenvectors[1]) # [-0.70710678 0.70710678] [-0.4472136 -0.89442719] |
行列 の固有値・固有ベクトルは以下で定義される。
の固有値・固有ベクトルは以下で定義される。
(1) 
これを以下のように変形する。
(2) 
この方程式が解をもつためには、以下の条件が必要。
(3) 
以下の行列に対する固有値、固有ベクトルを求める。
(4) 
この行列に対する固有値方程式は以下の通り。
(5) 
これを解くと、
(6) 
次に、各固有値に対する固有ベクトルを求める。
まず に対しては、
に対しては、
(7) 
確認してみると、
(8) 
また に対しては、
に対しては、
(9) 
こちらも確認してみると、
(10) 
なお、固有ベクトルを数値で表現する際、ノルムが1となるように正規化することが多い。
(11) 
上の例で固有値ベクトルを正規化すると以下の通り。
(12) 
ユークリッドの互除法(Euclidean Algorithm)は、2つの自然数の最大公約数を求める手順。
2つの自然数 の最大公約数(GCD: greatest common divisor)は、
の最大公約数(GCD: greatest common divisor)は、 と剰余
と剰余 の最大公約数に等しいという性質を利用。数を順次割り込んでいき、剰余がゼロとなったときの除数が最大公約数となる。
の最大公約数に等しいという性質を利用。数を順次割り込んでいき、剰余がゼロとなったときの除数が最大公約数となる。
(1) 
以下の余りあり除算を考える。
(2) 
 の公約数を
の公約数を とすると、上式は以下のように変形され、はと
とすると、上式は以下のように変形され、はと の公約数でもあることがわかる。
の公約数でもあることがわかる。
(3) 
一方、 の公約数を
の公約数を とすると、は
とすると、は との公約数であることがわかる。
との公約数であることがわかる。
(4) 
これより、の公約数の集合との公約数の集合は等しく、最大公約数も等しくなる。
(5) 
143と91の最大公約数を求める。
(6) 
PythonとCLispの再帰関数による実装例は以下の通り。ただし、第1引数>第2引数を前提としており、エラー処理はしていない。
Python
|
1 2 3 4 5 6 7 |
def gcd(a, b): if a % b == 0: return b else: return gcd(b, a % b) print( gcd(12, 8) ) |
CLisp
|
1 2 3 4 5 |
(defun mygcd (a b) (if (= (mod a b) 0) b (mygcd b (mod a b))) ) (print (mygcd 18 12)) |
整数 の約数(divisor, factor)とは、Nを割り切る整数(余りが生じない除数)。
の約数(divisor, factor)とは、Nを割り切る整数(余りが生じない除数)。
整数がの約数であるとき、 と表し、ある整数に対して
と表し、ある整数に対して が成り立つことでもある。一般には自然数あるいは0以上の整数で考える。
が成り立つことでもある。一般には自然数あるいは0以上の整数で考える。
通常は の条件を課すが、0も含める場合は、
の条件を課すが、0も含める場合は、 の時に限り0が約数になる。
の時に限り0が約数になる。
例えば12の約数は、以下の6個。
(1) 
であるとき、 である。これより
である。これより として、
として、 以下の約数
以下の約数 を求め、あとは
を求め、あとは を計算すれば、手間が半分で済む。
を計算すれば、手間が半分で済む。
が平方数の場合はも約数となり、約数の総数は奇数個、平方数でない場合は偶数異なる。
0の約数は となる整数であり、0以上の全ての整数である。
となる整数であり、0以上の全ての整数である。
1の約数は となる整数であり、1のみ。
となる整数であり、1のみ。
1は全ての整数の約数。
素数の定義が「1と自身以外に約数を持たない数」なので、約数は2個。
2つの数の公約数は、それらの最大公約数の約数。
と1の公約数は1のみ。
と0の公約数は、の約数全て(0の約数は0以上の全ての整数)。
 のとき、の公約数はの公約数でもある。
のとき、の公約数はの公約数でもある。
2つの数の最大公約数(greatest common divisor)を、 のように表す。
のように表す。
最大公約数を求める手順として、にユークリッドの互除法がある。
(2) 
被除数と除数の最大公約数は、除数と剰余の最大公約数でもある。
(3) 
倍数(multiple)とは、ある数(整数に限らない)を整数倍した数である。
(4) 
最小公倍数(least common multiple)とは、2つの整数の公倍数のうち、正で最小のもの。
たとえば36と56の最小公倍数は504。
2つの数の積は、それらの最大公約数と最小公倍数の積に等しい。
(5) 
 の商が
の商が 、余りがのとき、以下のように表される。d:divisor、q:quotient、r:reminderの意味。
、余りがのとき、以下のように表される。d:divisor、q:quotient、r:reminderの意味。
(1) 
余りの定義を「割る数未満の自然数あるいは0」とすると、
(2) 
割られる数が負の場合には、
(3) 
割る数が負の場合には、
(4) 
余りとして負の数を認めることもできる。ただしその場合、商と余りの組み合わせが1つとは限らない。
(5) 
余りの定義(要件)は以下の2通りがあり、いずれを採用するかは任意。


割る数が1あるいは-1のときは、余りは常に0。
(6) 
割られる数が1のときの余りは1、割られる数が-1なら余りは割る数の絶対値から1を現じた値(余りを正と定義した場合)。
(7) 
整数を正の整数 で割った余りが等しいとき、以下のように表記し、「はを法として合同である」という。
で割った余りが等しいとき、以下のように表記し、「はを法として合同である」という。
(8) 
これは次のようにも表現できる。
(9) 
(10) 
以下の例では、330度と−30度が合同となっている。360度回転するたびに元の位置に戻るイメージ。
(11) 
以下、合同式の を省略する。
を省略する。
(12) 
【証明】

(13) 
【証明】
(14) 
 が互いに素
が互いに素 のとき、以下が成り立つ。
のとき、以下が成り立つ。
(15) 
【証明】
(16) 
ここで は互いに素なので、
は互いに素なので、 がの倍数となる。
がの倍数となる。
(17) 
(18) 
【証明】
(19) 
(20) 
(1) 
(2) 
数学的帰納法で証明する。
 のとき、
のとき、
(3) 
 のとき、
のとき、
(4) 
ここで のときに以下が成り立つとする。
のときに以下が成り立つとする。
(5) 
このときに関しては、
(6) 
これを右辺は以下のように展開できる。

(7) 
これより、 に対して(1)が証明された。
に対して(1)が証明された。
数のような数による三角形をパスカルの三角形(Pascal’s triangle)と呼び、n行目の数の列が二項展開のn乗の係数となっている。
各項の計算の仕方は、一つ上の段の左右の数の和として求めていく(左端・右端の外側はゼロと考える)。
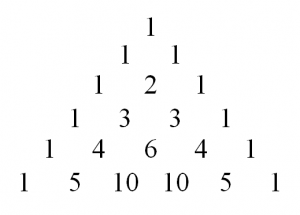
パスカルの三角形の各項が二項展開の計数となること、すなわちm段目のn項目の数を とし、これが
とし、これが となることを、数学的帰納法で証明する。
となることを、数学的帰納法で証明する。
(8) 
(9) 
初等的な微分の定義は以下の通り。
(1) 
(2) 
(3) 
ここで
(4) 
したがって、
(5) 
これより以下を得る。
(6) 
(8) 
(9) 
これより(7)を得る。
(10) 
 とおくと、
とおくと、
(11) 
(12) 
(13) 
とおいて、合成関数の微分より、
(14) 
(15) 
 、
、 とおいて、
とおいて、
(16) 
定数数列の和は、定数の項数倍。
(1) 
等差数列 の和は、初項と末項の和に項数を乗じた数の1/2。
の和は、初項と末項の和に項数を乗じた数の1/2。
(2) 
特に、
(3) 
等差数列の項目までの和を とすると、
とすると、
(4) 
式(3)を使って、
(5) 
等比数列 の和は以下の通り。
の和は以下の通り。
(6) 
特に、
(7) 
等差数列の項目までの和をとすると、
(8) 
等差部分と等比部分の両方を含んだ数列の部分和。
(9) 
一般的な部分和の差を用いる方法。
(10) 
微分を用いる方法。等比数列の公式、
(11) 
の両辺をで微分すると、
(12) 
両辺を倍して同じ式を得る。
(13) 
以下の式から出発する。
(14) 
これより、
(15) 
(16) 
上記と同じように、
(17) 
これより、
(18) 
数列 の階差数列が扱いやすい数列の場合。
の階差数列が扱いやすい数列の場合。
(19) 
の各項は、![a_1]](http://taustation.com/wp1/wp-content/ql-cache/quicklatex.com-96249091603643f6a3f34cca63bada14_l3.png "Rendered by QuickLaTeX.com") ~の和をとることで以下のように得られる。
~の和をとることで以下のように得られる。
(20) 
【例】
の階差数列が で
で のときの数列は以下のようになる
のときの数列は以下のようになる

この数列の一般項は、
(21) 
上式はの時も初期条件を満足する。
